Mizanur Rahman, Ph.D.
CAM Lab Director

members domain was triggered too early. This is usually an indicator for some code in the plugin or theme running too early. Translations should be loaded at the init action or later. Please see Debugging in WordPress for more information. (This message was added in version 6.7.0.) in /var/www/html/ati-wp/wp-includes/functions.php on line 6131
The way we move is changing. We are rapidly approaching a frontier where connected and smart technologies are poised to propel transportation into a future of autonomous vehicles, connected infrastructure, and intelligent mobility systems. Future transportation systems will increasingly rely on the interplay and balance of (i) physical structures such as the vehicles themselves, the surrounding infrastructure and technological hardware, (ii) cyber systems such as machine learning and artificial intelligence-driven computing, software applications, and distributed data storage systems, and (iii) the human stakeholders from developers and engineers, to public agencies responsible for managing transportation infrastructure to travelers themselves. Such modernization has the potential to drastically improve our lives through enhanced safety, facilitation of traffic flow, reduction in logistical costs, reductions in fuel consumption and minimization of air pollution.
The long-term research goals of the CAM Lab are:
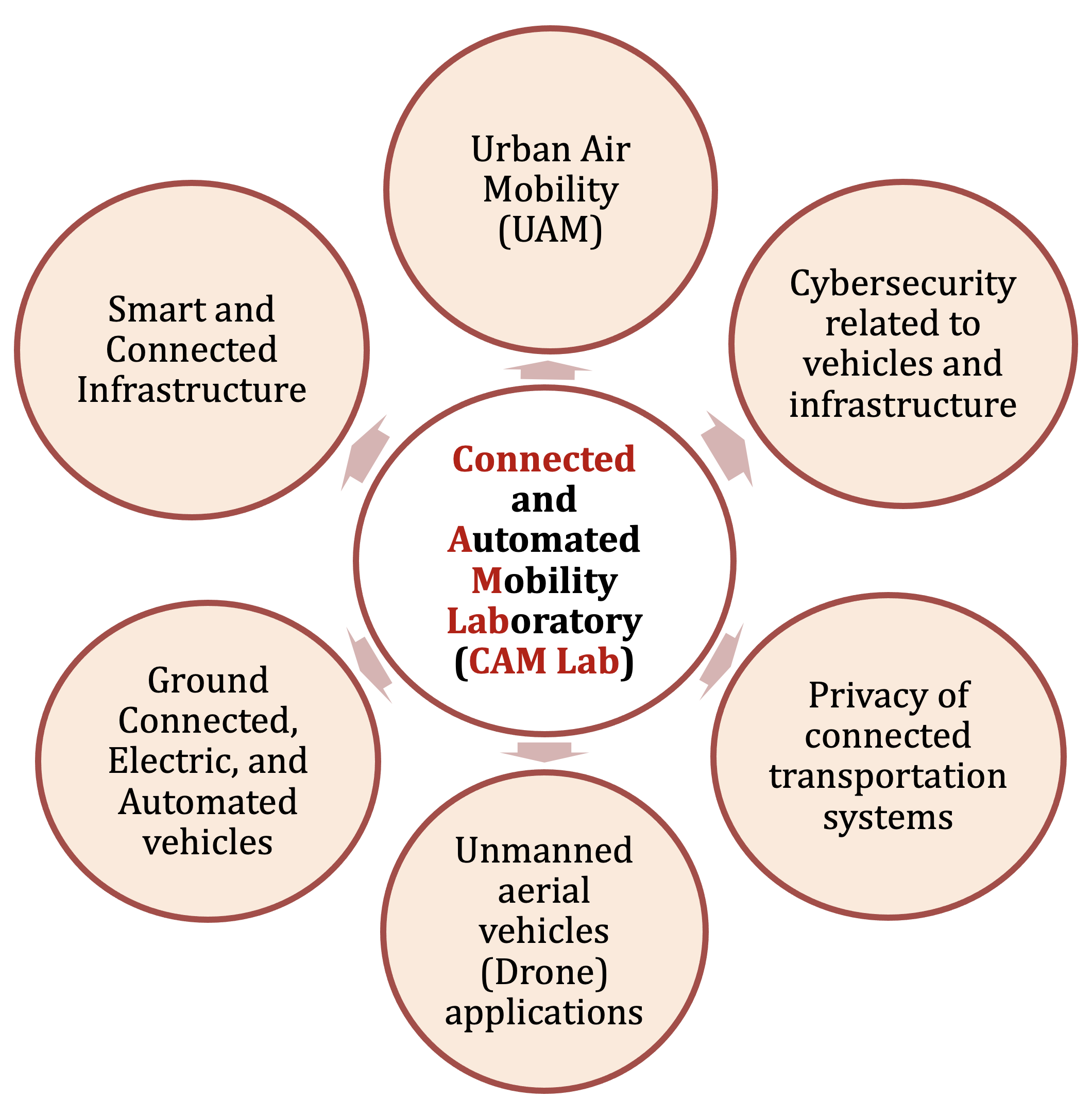
CAM lab’s specific research focus areas are:




Team Bios
Mizanur Rahman, Ph.D., CAM Lab Director
Mizanur Rahman is an assistant professor in the Department of Civil, Construction and Environmental Engineering at the University of Alabama, Tuscaloosa, Alabama. He received his M.Sc. and Ph.D. degrees in Civil Engineering (Transportation systems), from Clemson University, in 2013 and 2018, respectively. After his graduation in August 2018, he joined as a postdoctoral research fellow for the Center for Connected Multimodal Mobility (C2M2), a U.S. Department of Transportation Tier 1 University Transportation Center (cecas.clemson.edu/C2M2). After that, he had also served as an Assistant Director of C2M2. He was closely involved in the development of South Carolina Connected Vehicle Testbed (SC-CVT). Presently, he is the director of the Connected and Automated Mobility (CAM) Lab at the University of Alabama. His research focuses on traffic flow theory, cyber security, and transportation cyber-physical systems for connected and automated vehicles and smart cities.
Sagar Dasgupta, Ph.D. Student
Sagar Dasgupta is a Ph.D. student at the University of Alabama, Tuscaloosa, Alabama. He received his B.Tech. in Mechanical Engineering from Motilal Nehru National Institute of Technology Allahabad, Prayagraj, India. He received his M.S. in Mechanical Engineering from Clemson University, South Carolina. His research interest includes data analytics, machine learning, connected and automated vehicles, cybersecurity, and sensor fusion.
Muhammad Sami Irfan, Ph.D. Student
Muhammad Sami Irfan is a Ph.D. student at the University of Alabama, Tuscaloosa, Alabama. He received his B.Sc.Engg in Electrical and Electronic Engineering from Islamic University of Technology, Gazipur, Bangladesh. He obtained his MBA in Finance from the Institute of Business Administration under the University of Dhaka. His research interests include cybersecurity, machine learning and connected and automated vehicles.
Kazi Hassan Shakib, Ph.D. Student
Kazi Hassan Shakib will be joining the University of Alabama, Tuscaloosa, Alabama as a Ph.D. student from Summer-2022. He received his B.Sc. in Engineering degree in Computer Science & Engineering Department from Chittagong University of Engineering & Technology, Bangladesh. His research interest includes Connected Autonomous Vehicle, Machine Learning, EdgeML, Cloud Security, Internet of Things, and Encryption.
Courtland Hollis, Undergraduate Student
Courtland Hollis is an Undergraduate student at the University of Alabama, Tuscaloosa, Alabama. He will receive his B.S. in Civil Engineering from the University of Alabama in December 2022 . His research interest includes urban planning, traffic operations, traffic safety, and roadway design.
We have several active projects in the area of transportation cyber infrastructure and cyber-security of connected and automated mobility systems. Browse through the individual projects to explore their details and understand their impact on transportation systems.
National Science Foundation (NSF)
Principal Investigator, “CRII: SaTC: Cyber Resilient Localization and Navigation for Autonomous Vehicles (Award Number: 2104999)”, Start Date: 05/01/2021, End Date: 04/30/2023, $175,000.
Autonomous vehicles (AVs) in all modes of transportation (be it surface, aviation, or maritime) require accurate and reliable localization and navigation services in order to perform their autonomous functions. In many cases, a Global Positioning System (GPS) or Global Navigation Satellite System (GNSS) provides the required localization and navigation capabilities for surface transportation. A GPS (or GNSS) mostly depends on satellites and radio communication, which are subject to various obstructions, such as high-rise buildings, walls and ceilings in garages and tunnels, and even thick cloud cover. Besides these factors, GPS devices are also subject to intentional threats, such as radio interference, spoofing on communications, data manipulation on transmitted messages, the jamming of GPS receiver channels, and disruptions to the GPS infrastructures. Existing cyber-resilient solutions against GPS interference, such as high-definition maps and Wi-Fi or cellular-based technologies, are either data-intensive and costly or susceptible to signal interference and limited by coverage area. Alternatively, low-cost in-vehicle sensors (including gyroscopes, accelerometers, steering angle sensors, inertial measurement units, odometers, and cameras), which are not susceptible to signal interference, can provide effective strategies for detecting threats as well as locating and navigating AVs. To establish cyber-resilient localization and navigation for autonomous driving in a roadway environment, the goal of this research is to develop sensor fusion approaches that combine outputs from low-cost in-vehicle sensors with those of onboard geographical information systems.
This proposed research addresses intentional and unintentional interference issues of GPS services in order to improve the operational safety of AVs. The project will first investigate and develop an approach to detect GPS interference (such as jamming, spoofing, and natural interference) by predicting and identifying vehicle states (including distance traveled, turning, and lane-change maneuvers) based on data from low-cost in-vehicle sensors and the onboard graphical information system. This initial research thrust adopts a three-step approach: (i) create different types of jamming and spoofing attacks using interference devices in both a laboratory and controlled real-world environment; (ii) generate attack and attack-free datasets in real-world scenarios for predicting and detecting vehicle state information; and (iii) develop a deep sensor fusion model and dynamic time warping algorithm to detect GPS interference using the generated attack and attack-free datasets. The second stage of the project will develop an integrated cyber-resilient navigation system using data from in-vehicle sensors and the onboard graphical information system to guide an AV towards its intended destination in a GPS-denied or GPS-compromised environment. This will involve a three-step process: (i) generate route creation and location information using the graphical information system; (ii) fuse steering angle and gyroscope data to identify lane changes and turning movements using deep fusion and dynamic time warping techniques developed in the first research thrust; and (iii) integrate graphical information and sensor-fusion data for localization and navigation when the GPS signal is compromised. The final stage of research will develop a proof-of-concept of the cyber-resilient localization and navigation system using a conventional vehicle with low-cost AV sensors. Broader impacts entail a transformation of autonomous vehicle operations under intentional and unintentional interference.
Alabama Transportation Institute (ATI) Seed Grants:
Principal Investigator, “Digital Twin for Transportation Systems Management and Operations in Smart Cities,” Start Date: 10/01/2021, End Date: 09/30/2022, $34,000.
Rapidly developing technologies are radically changing transportation and promising to do so even more in the future. Vehicles are moving towards autonomous driving, and cities are focusing on creating a cyber transportation infrastructure that will transform legacy transportation infrastructure into connected, adaptable, and automated systems. As we are slowly shifting towards an intelligent or smart transportation system, the digital twin can further revolutionize traffic management and operations. A digital twin is a digital version of a physical object or process where there will be a two-way real-time data exchange between the physical and digital entity. The concept of creating “twins” is to serve as tools to improve decision-making. For example, imagine that a downtown city worker viewed a traffic simulation seconds after the car crash and approved a recommended route for the ambulance, alerting all those connected (and automated) vehicles to move aside. The research focus area of this proposal will be the development of a digital twin framework for traffic management and operations in smart cities. This framework will serve as a proof of concept for digital twin systems for connected transportation systems.
CyberSeed – UACI Seed Grant Program:
Principal Investigator, “Security of Transportation Cyber Infrastructure in Smart Cities – A Case Study of Intelligent Traffic Signal Systems using Machine Learning/Artificial Intelligence”, Start Date: 05/01/2021, End Date: 04/30/2022, $29,448.
Transportation cyber infrastructure, such as intelligent traffic signals, roadside data infrastructure, and cloud infrastructure, will be an integral part of a smart city. However, complex and highly connected transportation cyber infrastructure systems are subject to widespread failure from cyber-attacks, leading to devastating impacts, such as corporate and personal data breaches, disruptions to system and vehicle performance, and ultimately compromised public safety. A cyber-attack on connected and automated transportation systems may well lead to disastrous consequences. For example, attackers could gain access to the control system of connected vehicles and intelligent traffic signals, and cause catastrophic multi-vehicular accidents. When these are located across different parts of a city, they could shut down the entire transportation system of the city. With the focus on automation of vehicles and services in transportation systems, our society will become more dependent on Machine Learning (ML)/Artificial Intelligence (AI) systems that have the capability to learn threats and guard against the computer and network security attacks. This project’s overarching long-term goal is to investigate security vulnerabilities and provide ML/AI-based security solutions related to transportation cyber infrastructure in smart cities.
This project’s specific scope is to explore the security vulnerabilities of intelligent traffic signals and develop a proof-of-concept of a predictive approach for cyber-attack detection and mitigation using ML/AI. It is a challenge to differentiate between a cyber-attack and a variation of the traffic pattern and to develop a real-time security solution because of the dynamic nature of vehicle arrival rate at the intersection. Existing studies use statistical, optimization and rule-based techniques to develop attack detection strategies for traffic signals. However, there is no study that uses a predictive approach using ML/AI to tackle the dynamic cyber security problem of traffic signal systems. The outcome of this research includes: (i) an ML/AI-based cyber security detection and mitigation framework for intelligent traffic signals; and (ii) a unique database that contains attack-free and attack data (will be published in GitHub). Our research is directly related to the several UA’s strategic areas, such as cyber security and transportation. In addition, our proposed research is within the following topic areas: (i) artificial intelligence and machine learning; (ii) cyber security; and (iii) cyber infrastructure.
The significance of this project is to provide pilot data, preliminary work, and proof of concept (quantitative and/or qualitative) for attack detection and mitigation framework of intelligent traffic signals. All these will create the base for relevant research on cyber security of transportation cyber infrastructure in smart cities.
Principal Investigator, “Connected and Automated Mobility Laboratory (CAM Lab)”, Start Date: 10/01/2021, End Date: 09/30/2022, $50,000.
A comprehensive list of our published research is presented in this section for the interested reader. CAM lab affiliated authors’ names have been highlighted in bold and underlined font.
Published Book Chapter
Published Peer-Reviewed Journal Papers
Published Peer-Reviewed Conference Papers
Presentations
Stay up to date with our projects, publications, research collaborations and much more. Follow ATI (@ATI_UA) on Twitter for updates on CAM Lab activities.
101st annual meeting of Transportation Research Board
CAM lab members Sagar Dasgupta and Muhammad Sami Irfan recently attended the 101st annual meeting of the Transportation Research Board(TRB) at Washington D.C. There they presented their work on “Reinforcement learning approach for GNSS spoofing attack detection of autonomous vehicles” in the poster presentation session.

IEEE George N. Saridis Best Transactions Paper Award for Outstanding Survey
CAM lab director Dr. Mizanur Rahman was awarded the IEEE George N. Saridis Best Transactions Paper Award as the lead author of the paper titled “Review of Microscopic Lane-Changing Models and Future Research Opportunities” published in the IEEE Transactions on Intelligent Transportation Systems.
New ideas to foster future innovations are always welcome at the CAM lab. Get in touch with us through our contact information below. We would love to hear your research thoughts!
Mizanur “Mizan” Rahman, Ph.D.
Assistant Professor
Director, Connected and Automated Mobility Lab (CAM Lab)
(205) 348-1717 (Office)
(864) 650-2926 (Cell)
(205) 348-6959 (Fax)
mizan.rahman@ua.edu
Department of Civil, Construction & Environmental Engineering
The University of Alabama
3015 Cyber Hall
Box 870205
Tuscaloosa, AL 35487